
Tripura
High speed reconnaissance UAV


What it is
Tripura is a compact, aerodynamically optimized unmanned aerial platform designed to explore the upper limits of quadrotor forward-flight speed and efficiency.
Unlike conventional multirotor designs optimized for hover and low-speed maneuverability, Tripura prioritizes extreme forward-flight performance through a streamlined teardrop fuselage, minimized frontal area, and low-interference arm geometry. The platform is engineered to maintain structural integrity, controllability, and airflow stability at very high airspeeds.
The design emphasizes clean airflow management, modular construction, and rapid serviceability, treating high-speed UAV flight as an aerodynamic and systems problem rather than a brute-force propulsion exercise.
Why I'm building it
Most multirotor UAVs are fundamentally constrained by drag-heavy layouts and hover-centric design assumptions. Tripura was built to challenge those assumptions and investigate how far compact quadrotor platforms can be pushed in sustained forward flight when aerodynamic efficiency is treated as a first-class design constraint.
The project serves as an exploration into high-speed UAV layouts for reconnaissance-oriented platforms, where speed, compactness, and rapid deployment matter more than long hover endurance. It also provides a practical testbed for studying airflow behavior, structural loads, and control stability at velocities rarely targeted by traditional quadrotor designs.
How it works(High-Level)
At a conceptual level, Tripura is designed around reducing parasitic drag while preserving structural robustness and controllability.
Aerodynamic Layout: The airframe uses a teardrop fuselage profile to minimize pressure drag and promote attached flow during forward flight. Arms are positioned to reduce propeller–body interference and wake interaction, enabling cleaner airflow across the platform.
Structural & Modular Design: Motor mounts and critical structural components are modular and serviceable, allowing rapid iteration, replacement, and tuning. The nose section is designed for quick access while maintaining aerodynamic continuity.
Internalized Systems: Electronics and wiring are internalized within the fuselage, with controlled airflow paths for cooling. This reduces external drag sources while maintaining thermal stability at high power draw.
Stability at High Speed: The geometry is designed to preserve symmetric and predictable flow behavior at elevated velocities, reducing asymmetric wake effects and minimizing destabilizing aerodynamic moments during aggressive forward flight.
Performance Targets & Analysis
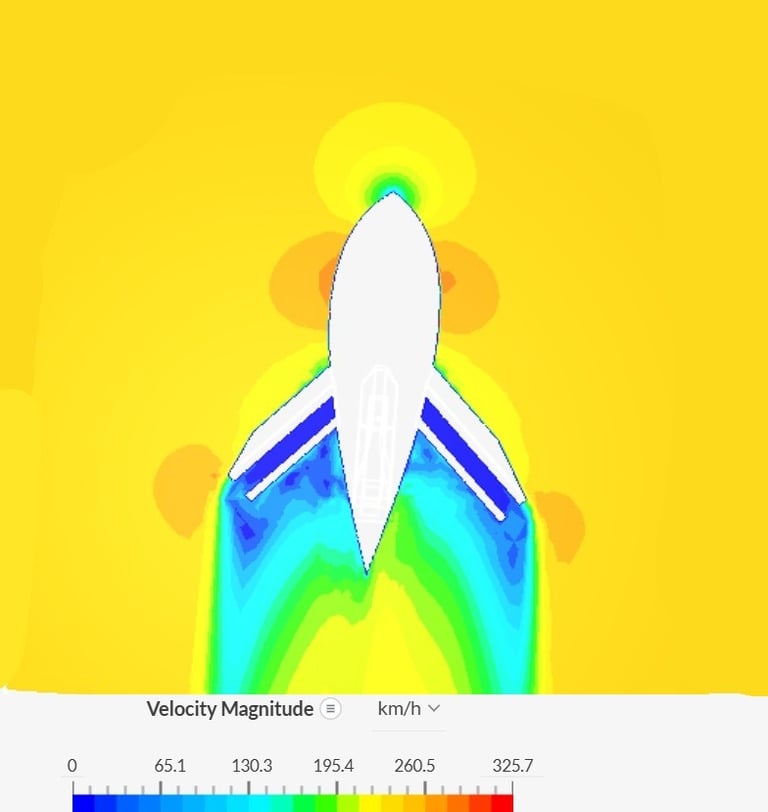
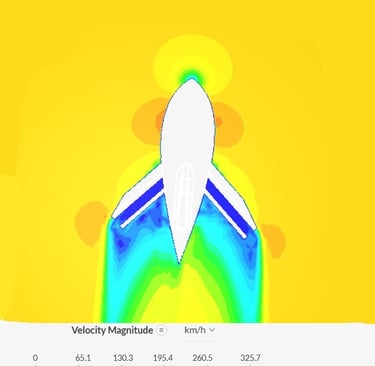
Preliminary aerodynamic analysis and simulation indicate stable, attached flow and a narrow wake profile at speeds exceeding 150 km/h. The platform is architected to scale toward approximately 250 km/h in forward flight under appropriate propulsion, control tuning, and structural validation.
Wind-tunnel-style simulations and CAD-based analysis are used to study airflow behavior, drag characteristics, and structural stress distribution under high-speed conditions.
Gallery / Analysis
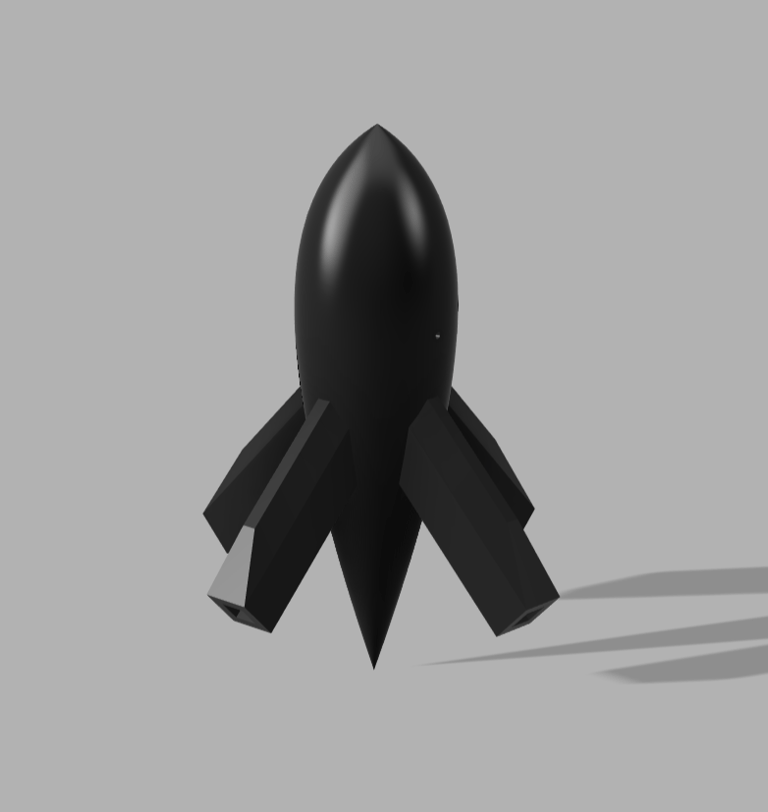
CAD render(without motor mounts)
Wind Tunnel Analysis